 Código fuente en assembler - Por Profesor Alejandro Lorenzut (MPLABX 3.0)
Código fuente en assembler - Por Profesor Alejandro Lorenzut (MPLABX 3.0)
Código fuente en C (MPLABX 3.0)
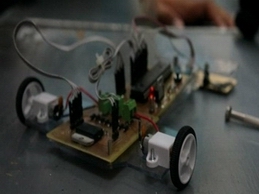
20151129 - Los alumnos modificaron el código para ajustarlo a las condiciones reales de funcionamiento físicas.
20150923 - Se actualizó (compilado, y depurado) el código para que cumpla con la última versión del circuito en Proteus (20150708) que
incluye leds que se encienden al activarse los motores.
Circuito completo para Proteus 8.2 - versión 20151129 - Circuito eléctrico e impreso -Por Profesor Alejandro Lorenzut
Últimos cambios:
Se cambiaron las resistencias de los sensores CNY70 de 10K por unas de 47K
Se agregó un conector para poder programar el circuito integrado sin sacarlo de su placa de impreso de funcionamiento para minimizar dańos al PIC 16f84A
Falta acomodar conector de 5 pines para que coincidan con los de la placa programadora GPIC.